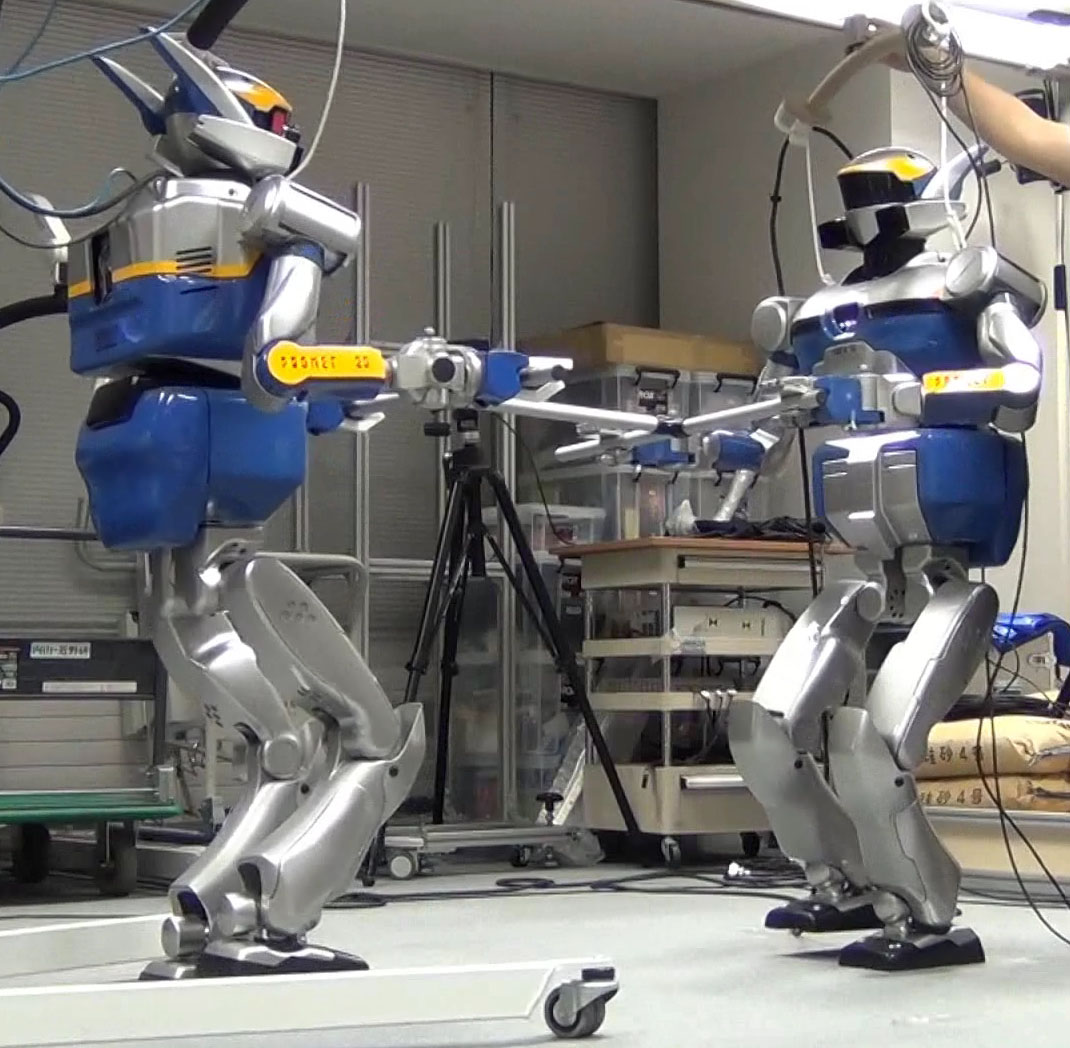
1 ヒューマノイドロボットによる災害対応
災害発生時に,2次災害の恐れがあるなど人間が被災地に近づけない場合,ヒューマノイドロボットによる災害対応が期待されています.被災地では,がれきを撤去し災害対応活動への経路を確保することが必要となります.その際に求められる能力は,泥地や砂地などの悪路でも歩行可能なこと,大きながれきを撤去するために複数のロボットが協調することです.そこで,体幹バランス制御と足の着地位置制御を組み合わせた軟弱地面2足歩行技術と,複数台のロボットが互いに強調して大きな物体を搬送する技術を開発しました.この技術を応用することで,ヒューマノイドロボットが災害対応などで活躍することが期待されます.

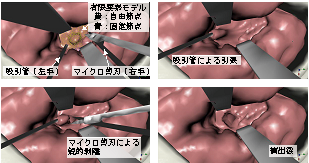
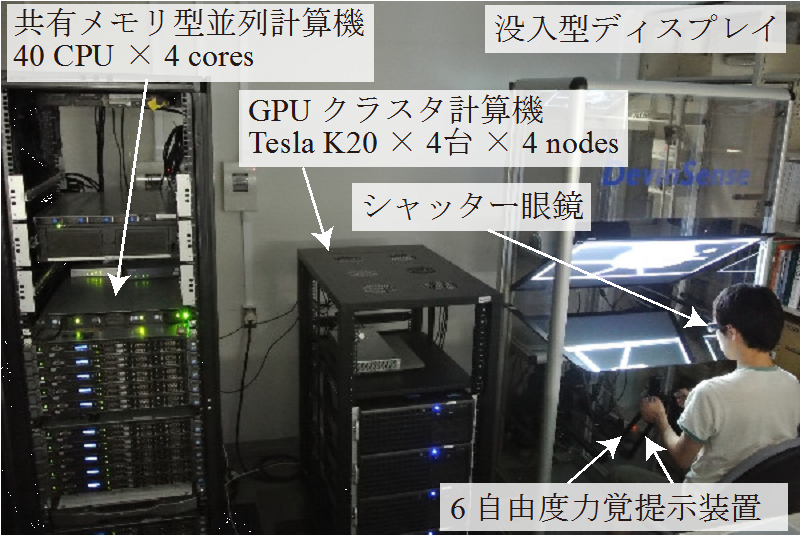
2 医療安全を担う手術シミュレータ
ハプティックデバイス(力覚提示装置)という装置を用いて,コンピュータグラフィックスで提示される仮想的な物体を触った感触を擬似的に体験させるシミュレーションを,ハプティックシミュレーションと言います.脳神経外科医のトレーニングや,手術計画の立案・確認への応用を目指して,脳神経外科手術ハプティックシミュレータを開発しています.また患者の医療画像(MRI画像やCT画像)から,ハプティックシミュレーションに必要な3次元有限要素モデルを自動生成する技術を開発しています.実際の患者のモデルを用いた手術前シミュレーションによる手術計画の確認作業により,困難な手術における安全性の向上が期待されます.

{kind=link}
{kind=link}
{kind=link}