1 暮らしや労働を楽にする軽労化スーツ
{kind=link}
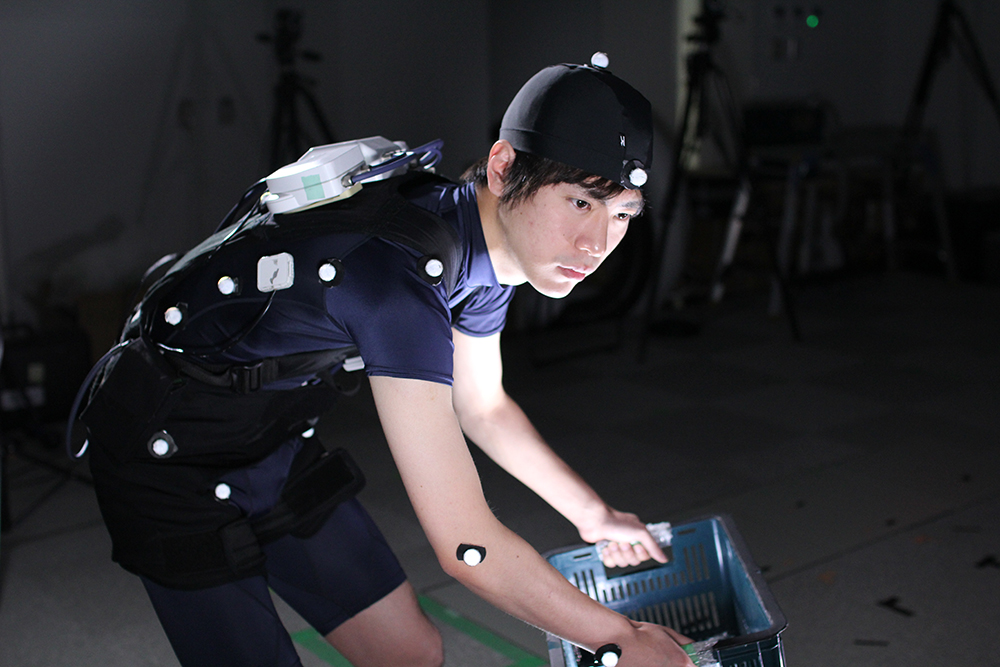
ロボット工学や人間工学を基盤として,人間中心の研究開発,ものづくりができる人材育成を目指しています.人の手による作業における作業者の負担軽減を目的とした「軽労化®技術」の研究開発では,軽労化スーツ「スマートスーツ®」を開発しています.スマートスーツは大学発ベンチャー企業から試験販売されており,国内外の農業や介護など様々な分野で広く使われています.また,軽労化技術を実用化し,広く普及するための研究会活動を行い,研究室学生もユーザー,メーカー,研究者など様々な人々と真剣に意見交換しています.現場の人々と多くを語り合い,それを学問の世界に取り込んで,役に立つロボット技術を一緒に創り出しませんか?

2作業負担を見える化するウェアラブルセンサ
{kind=link}
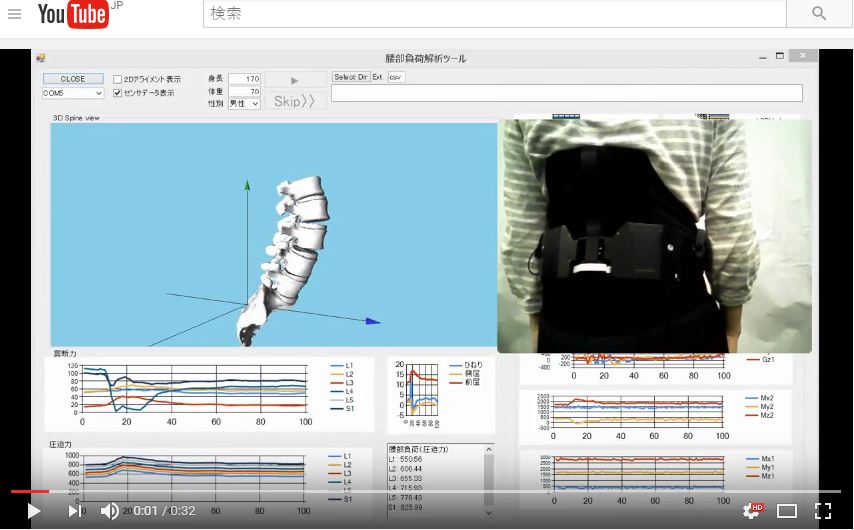
着るだけで作業中の腰の負担を可視化することができる複数のセンサを内蔵したセンサ内蔵ウェアを開発しました.加速度・角速度センサおよび曲げセンサの情報から腰仙椎のアライメント(姿勢)を,筋硬さセンサの情報から腰回りの筋活動を推定し,腰にかかる負担を正確に計測するセンシング手法を新たに開発しました.介護施設における介護士の腰負担計測し,作業中の腰の負担を可視化することに成功しました.介護施設ほか労働現場で活用できる製品・サービスとしての展開を考え,作業中の腰負荷データを蓄積し,ビッグデータ解析することで,腰負荷の軽減,人員配置の最適化など,業務改善に繋がるソリューションの提供を行うべく,開発を進めていく予定です.
3複数人物の行動追跡ができる画像センシングシステム
{kind=link}
店舗内の人の購買行動を解析するための画像センサシステムを開発しました.ステレオカメラセンシングにより得られた画像情報から,複数歩行者を追跡することができます.開発した追跡システムはパーティクルフィルタを応用し,追跡人物の状態によってそれらを管理することで,人物どうしのすれ違いや計測空間内の頻繁な出入りに対して頑健な追跡性能を実現しました.また,複数人物が歩行するような追跡実験では,計測空間内を歩行する人物の動線および高さを取得できることが確認できました.マーケティングやセキュリティの分野へ応用することが期待できます.
